La présente invention concerne un dispositif de
cintrage d'éléments métalliques allongés et notamment
des tubes en acier, cuivre, ou aluminium destinés par
exemple à constituer des canalisations destinées à
l'automobile pour le transport de liquide de frein, de
carburant, de fluide de réfrigération, ou de liquide de
direction assistée.
Le cintrage d'un tube consiste à déformer
plastiquement et localement le tube de manière à former
un coude. La plupart des dispositifs de cintrage connus
mettent en oeuvre soit un procédé de cintrage par
emboutissage, soit un procédé de cintrage rotatif.
Dans le cintrage par emboutissage, un galet
mobile solidaire de la tige d'un vérin linéaire est
appliqué selon une direction transversale contre une
extrémité libre d'un tube maintenu dans un étau pour
enrouler partiellement celle-ci autour d'un galet fixe.
Dans le cintrage rotatif, l'extrémité libre d'un
tube maintenu dans un étau est disposée dans une tête de
cintrage comprenant deux galets d'axes parallèles, entre
lesquels s'étend le tube, et qui sont montés sur un
support solidaire de la tige d'un vérin rotolinéaire (on
rappelle que dans un vérin rotolinéaire, la tige
coulisse le long de son axe longitudinal et/ou pivote
autour de celui-ci) . La rotation de la tige provoque le
cintrage du tube, un des galets enroulant partiellement
le tube autour de l'autre galet.
En général, les industriels mettant en oeuvre de
tels procédés de cintrage utilisent deux types de
machines.
Dans le premier type, la machine comporte un
bâti sur lequel est fixé au moins un étau de maintien du
tube à cintrer et, pour chaque coude à réaliser, un
vérin de cintrage dans une position précise
correspondant à la position du coude à réaliser sur le
tube. De telles machines, dédiées à la réalisation d'un
tube particulier, sont relativement peu onéreuses et
sont donc rentables pour des productions de grande
série. Une telle machine est cependant relativement
longue à fabriquer. En outre, lorsque la géométrie du
tube à réaliser doit être modifiée pour que le tube
satisfasse à de nouvelles contraintes (par exemple, dans
le cas d'une conduite de transport de liquide de frein
dans un véhicule, ces contraintes peuvent être liées au
passage d'un système de freinage classique à un système
à anti-blocage de roues, d'un poste de conduite à gauche
à un poste de conduite à droite, d'un système de frein à
tambour à un système de frein à disque, à la
modification d'un coude engendrant un bruit ou une usure
importante...) nécessitent de renvoyer la machine à
l'atelier pour que soient effectuées les modifications
correspondantes du positionnement des vérins de
cintrage. Cette opération requiert le démontage de la
machine et s'avère relativement longue et coûteuse.
Dans le deuxième type, la machine comporte une
ou plusieurs têtes de cintrage dont les axes sont
numérisés et des moyens pour déplacer cette tête de
cintrage par rapport au tube. Cette machine est très
flexible et donc bien adaptée à la réalisation de pièces
de petite et moyenne série. Toutefois, la nécessité de
positionner la tête de cintrage pour chaque coude rend
une telle machine lente et peu précise. Par ailleurs,
ces machines sont coûteuses et ce d'autant plus que la
précision des pièces à réaliser est élevée.
On connaít par les documents US-A-4 604 885, US-A-5
765 426 et DE-A-4 242 002 des dispositifs de
cintrage composés d'un organe de maintien central
entouré de deux organes de cintrage montés de façon
réglable sur un bâti.
En particulier, le document US-A-4 604 885
décrit un dispositif de cintrage d'éléments métalliques
allongés, notamment des éléments tubulaires, comprenant
au moins un module de cintrage monté sur un bâti, ledit
module comportant un profilé support sur lequel est fixé
au moins un organe de maintien d'un élément à cintrer
dans une position centrée sur un axe parallèle au
profilé support, et au moins un organe de cintrage,
conformément au préambule de la revendication 1.
Les organes de cintrage sont généralement montés
sur une potence portant une tête de cintrage travaillant
dans l'axe de maintien de la pièce à cintrer, la tête
étant selon le cas orientable autour de l'axe de
maintien par un moyen positionnel manoeuvrant ladite
tête dans un plan perpendiculaire à l'axe.
Ces dispositifs astreignent la tête de cintrage
à rester dans l'axe de maintien, laquelle ne peut s'en
écarter de par son montage. Ceci est un inconvénient
lorsque par exemple il faut dégager la tête pour
permettre le positionnement d'un élément à cintrer, ou
lorsqu'il faut effectuer un cintrage en dehors de l'axe
de maintien.
A cet égard, on peut citer le document US-A-4
945 747 qui décrit un dispositif analogue à ceux décrits
précédemment, dans lequel la tête de cintrage est fixée
à l'extrémité d'un bras robotisé, autorisant un désaxage
de la tête de cintrage. Il s'agit d'une solution
techniquement intéressante, mais très onéreuse à mettre
en oeuvre.
L'arrière-plan technologique relatif aux têtes
de cintrage est enfin illustré par le document DE-A-38
11 891.
Le but de l'invention est de proposer un
dispositif de cintrage qui soit économique, susceptible
d'être reconfiguré de manière simple pour faire face à
des modifications de géométrie ou de dimensions des
produits à réaliser et posséder une flexibilité
importante.
En vue de la réalisation de ce but, on prévoit,
selon l'invention, un dispositif de cintrage du type
précité, dans lequel l'organe de cintrage comporte une
potence fixée de façon réglable en position le long du
profilé support et au moins un vérin de cintrage dont la
tige est équipée d'une tête de cintrage, ledit vérin
étant relié à la potence par un système positionnel
comportant un coulisseau en arc de cercle, monté de
manière réglable en position sur la potence et lié au
vérin de cintrage à l'une de ses extrémités de façon que
l'axe de la tige du vérin soit astreint à pivoter autour
de l'axe de maintien dans un plan perpendiculaire audit
axe.
Ainsi, le réglage de la position de l'organe de
cintrage par rapport à l'organe de maintien permet de
modifier la position du coude à réaliser sur l'élément
allongé, et le pivotement du vérin de cintrage autour de
l'axe de maintien permet de modifier l'orientation du
coude par rapport à la partie de l'élément allongé qui
est reçue dans l'organe de maintien. Ces différents
réglages permettent donc d'obtenir de manière simple
différentes configurations de cintrage.
Selon une caractéristique particulière, le
module de cintrage comprend deux organes de cintrage
s'étendant chacun d'un côté de l'organe de maintien.
Avantageusement, le vérin de cintrage est un
vérin rotolinéaire.
L'orientation de la tête de cintrage autour de
son axe de pivotement se combine avec le pivotement du
vérin de cintrage autour de l'axe de maintien pour
obtenir un grand nombre de géométries de coudes
conjuguant des orientations et des angles différents.
De préférence alors, le système positionnel
autorise une plage de pivotement du vérin de cintrage
d'environ 180°.
Un maximum de géométries de coudes peut de la
sorte être obtenu.
Selon une caractéristique additionnelle, le
dispositif comprend au moins un module de transfert
d'éléments à cintrer comportant un profilé support sur
lequel est monté pour pivoter un arbre parallèle à l'axe
de maintien et au moins un bras manipulateur ayant une
extrémité solidaire dudit arbre pour s'étendre
transversalement par rapport à celui-ci et une extrémité
opposée équipée d'un moyen de préhension.
Le module de transfert permet de manière simple
d'alimenter en éléments à cintrer le module de cintrage
ou d'évacuer de celui-ci les éléments cintrés. Cette
réalisation à l'aide d'un bras manipulateur présente
l'avantage d'un encombrement limité conférant au
dispositif de cintrage une structure compacte.
De préférence alors, le bras manipulateur est
télescopique et les profilés support des modules de
cintrage et de transfert sont montés sur le bâti pour
être réglables en position l'un par rapport à l'autre.
Cette disposition est particulièrement
avantageuse dans les dispositifs de cintrage comprenant
plusieurs modules de cintrage et plusieurs modules de
transfert, car elle permet une exploitation optimale de
l'espace disponible en fonction de l'encombrement des
pièces à réaliser et du nombre de modules de cintrage
employés.
Alternativement, le module de transfert comporte
au moins un guide rectiligne sensiblement horizontal
s'étendant transversalement à l'axe de maintien, et au
dessus du module de cintrage, sur lequel est monté
coulissant au moins un chariot muni d'un organe de
préhension monté mobile verticalement sur ce chariot.
Ce second type de module de transfert permet de
la même façon d'alimenter en éléments à cintrer le
module de cintrage ou d'évacuer de celui-ci les éléments
cintrés.
Avantageusement, au moins le profilé support du
module de cintrage est monté sur le bâti pour s'étendre
verticalement.
L'encombrement du dispositif de cintrage est de
la sorte limité et le dispositif de cintrage ne
nécessite qu'une surface au sol de dimensions réduites.
Selon une autre caractéristique particulière, le
module de cintrage comprend deux organes de maintien
associés chacun à un organe de cintrage, l'un des
organes de maintien et l'organe de cintrage associé
étant montés sur un chariot réglable en position le long
du profilé support. Ceci sera notamment intéressant dans
le cas où les éléments à cintrer sont de structure
hybride, en étant constitués par des éléments bout à
bout alternativement souples et rigides.
Enfin, on pourra prévoir que l'organe de
maintien, l'organe de cintrage et l'éventuel module de
transfert sont chacun motorisés et commandés de façon à
ce que leur position spatiale soit mémorisable dans le
cadre d'une commande automatisée du dispositif.
D'autres caractéristiques et avantages de
l'invention ressortiront à la lecture de la description
qui suit d'un mode de réalisation particulier non
limitatif de l'invention.
Il sera fait référence aux dessins annexés,
parmi lesquels :
- la figure 1 est une vue partielle en
perspective d'un dispositif de cintrage selon
l'invention, comportant un module de cintrage ici
encadré de deux modules de transfert,
- la figure 2 est une vue en élévation d'un
organe de cintrage selon une direction longitudinale du
profilé support, avec un détail de la tête de cintrage à
plus grande échelle,
- la figure 3 est une vue analogue à la figure 2
selon une direction transversale du profilé support,
- la figure 4 est une vue schématique en
élévation d'un dispositif de cintrage conforme à
l'invention selon une configuration particulière,
- la figure 5 est une vue schématique en
élévation d'un dispositif de cintrage selon une variante
de configuration.
En référence aux figures, le dispositif de
cintrage conforme à l'invention comprend un bâti 1 sur
lequel sont montés de manière alternée des modules de
cintrage généralement désignés en 2 et des modules de
transfert généralement désignés en 3, ici trois modules
de cintrage 2 et quatre modules de transfert 3.
Le bâti 1 comprend un piétement 4 supportant
deux longerons 5 parallèles. Chaque longeron 5 est formé
d'un profilé en métal tel que l'aluminium ayant une
section transversale sensiblement rectangulaire et
comportant des rainures longitudinales 6 ayant une
section transversale sensiblement en forme de T.
Chaque module de cintrage 2 comprend un profilé
support 7 sur lequel sont montés un organe de maintien
(ici unique) portant la référence générale 8 et deux
organes de cintrage portant la référence générale 9
s'étendant chacun d'un côté de l'organe de maintien 8.
Le profilé support 7 est formé d'un profilé en
métal tel que l'aluminium ayant une section transversale
sensiblement rectangulaire et comportant des rainures
longitudinales 10 ayant une section transversale
sensiblement en forme de T.
L'organe de maintien 8 comprend un montant 11
ayant une extrémité inférieure solidaire d'une embase 12
de fixation au profilé support 7 et une extrémité
opposée équipée d'une pince 13 de type connu agencée
pour maintenir par serrage un élément à cintrer, par
exemple un tube métallique, le long d'un axe 14
parallèle au profilé support 7.
Chaque organe de cintrage 9 comprend en outre
une potence 15 ayant une extrémité inférieure 16 formant
une embase de fixation au profilé support 7 et une
extrémité supérieure 17 dans laquelle est ménagé, dans
un plan perpendiculaire au profilé support 7, un
logement 18 en arc de cercle recevant à coulissement un
coulisseau 19 également en arc de cercle. Le logement 18
et le coulisseau 19 s'étendent dans un plan
perpendiculaire à l'axe de maintien 14 et sont centrés
sur ce dernier. Le coulisseau 19 s'étend ici sur un
angle d'environ 90°. Le logement 18 est ici obturé par
un couvercle 20 maintenu sur l'extrémité 17 par des vis
21 qui, lorsqu'elles sont vissées, serrent le coulisseau
19 dans la position angulaire désirée entre le couvercle
20 et le fond du logement 18 immobilisant ainsi le
coulisseau 19 dans la position angulaire désirée par
rapport au montant 15.
Chaque organe de cintrage 9 comprend également
un vérin rotolinéaire 22 dont le corps est fixé, ici par
des vis, sur une extrémité du coulisseau 19 de manière à
s'étendre transversalement par rapport à l'axe de
maintien 14. La tige du vérin 22 possède une extrémité
libre équipée d'une tête de cintrage 23. La tête de
cintrage 23 comprend de façon connue en soi un galet 24
centré sur l'axe de pivotement 25 de la tige du vérin 22
et un galet 26 excentré et d'axe parallèle à celui du
galet 24. Les galets 24, 26 sont pourvus d'une gorge
périphérique ayant une section transversale
correspondant à celle du tube à cintrer. Le vérin 22 est
en outre relié à la potence 15 par un système
positionnel, constitué ici par le coulisseau 19 en arc
de cercle. Le vérin 22 est ainsi fixé à une extrémité du
coulisseau 19 de façon que l'axe de la tige dudit vérin
soit astreint à pivoter autour de l'axe de maintien 14,
essentiellement dans un plan perpendiculaire audit axe.
La tige du vérin 22 coulisse entre une position sortie,
dans laquelle le logement de section transversale
circulaire défini par les gorges des galets 24, 26 est
de façon habituelle centré sur l'axe de maintien 14, et
une position rentrée. Le cas échéant, il est tout à fait
possible de positionner ce logement, dans la position
sortie du vérin 22, de sorte qu'il ne coïncide pas
exactement avec l'axe de maintien 14, en vue d'effectuer
un cintrage sur une partie du tube s'étendant hors dudit
axe.
Le vérin 22 et la pince 13 sont alimentés en air
comprimé par l'intermédiaire de conduites courant
respectivement le long du coulisseau 19 et de la potence
15 et le long du montant 11 pour être raccordées à un
dispositif de commande et d'alimentation en air comprimé
non représenté ici.
L'organe de maintien 8 et les organes de
cintrage 9 sont fixés sur le profilé support 7 de
manière à pouvoir être réglables en position les uns par
rapport aux autres le long de ce profilé support. Les
organes de cintrage 9 sont par exemple fixés par
l'intermédiaire de boulons 27 traversant l'embase 16 et
ayant une extrémité inférieure reçue dans une des
rainures 10 du profilé support 7. On comprend que,
lorsque les boulons 27 sont desserrés, les organes de
cintrage 9 peuvent être déplacés le long du profilé
support 7. L'organe de maintien 8 peut être fixé sur le
profilé support 7 de la même manière ou à demeure.
Chaque module de transfert 3 comprend quant à
lui un profilé support 28 identique au profilé support 7
et parallèle à celui-ci, et un arbre 29 monté sur le
profilé support 28 par l'intermédiaire de paliers 30
pour pivoter autour de sa direction longitudinale qui
s'étend parallèlement à l'axe de maintien 14. Chaque
module de transfert 3 comprend également un bras
manipulateur 31 s'étendant de préférence
perpendiculairement à l'axe de maintien 14 et ayant une
extrémité formant un collier de serrage 32 de l'arbre 29
permettant un positionnement réglable du bras
manipulateur 31 le long de l'arbre 29, et une extrémité
opposée équipée d'un moyen de préhension de type connu
tel qu'une pince 33, raccordé par des conduites courant
le long du bras manipulateur 31 à un dispositif connu de
commande et d'alimentation en air comprimé non
représenté ici.
Les arbres 29 des modules de transfert 3 sont
reliés les uns aux autres par l'intermédiaire d'une tige
de commande 34 (visible sur la figure 5) articulée à un
maneton 35 fixé sur une extrémité de chaque arbre 29 de
manière à transformer un mouvement alternatif de
translation appliqué (par un moyen non représenté) à la
tige de commande 34 en un mouvement rotatif alternatif
des arbres 29 et en un mouvement de balancier des bras
manipulateurs 31.
Avantageusement, les profilés support 7 et 28
sont fixés aux longerons 5 de façon analogue aux organes
de maintien 9 sur le profilé support 7, de manière à
pouvoir être positionnés les uns par rapport aux autres
le long des longerons 5. Le bras manipulateur 31 de
chaque module de transfert 3 est alors de préférence
télescopique.
A la figure 4, le bâti 1 est associé à un
ensemble amont 36 d'alimentation en tubes à cintrer de
type connu (par exemple comportant un élévateur) et un
ensemble aval 35 d'évacuation des tubes cintrés
également de type connu.
Dans ce dispositif, les longerons 5 s'étendent
horizontalement.
Les modules de cintrage 2 réalisent six coudes
sur chaque tube à partir des extrémités de ceux-ci vers
leur partie médiane, chaque module de cintrage 2
effectuant deux coudes. L'organe de maintien 8 étant
disposé entre les deux organes de cintrage 9, le
maintien du tube est assuré sur sa partie médiane qui
reste ainsi rectiligne et permet de conserver un
référentiel de positionnement fixe d'un module de
cintrage à un autre simplifiant de la sorte le
positionnement des vérins 22 dont la tête 23 intervient
sur une portion rectiligne centrée sur l'axe de maintien
14.
Le bras manipulateur 31 du module de transfert 3
adjacent à l'ensemble d'alimentation 36 est mobile entre
une première position dans laquelle il saisit un tube à
cintrer dans l'ensemble d'alimentation 36 et une
deuxième position dans laquelle il positionne ce tube
dans l'organe de maintien 8 du module de cintrage 2
adjacent. Le bras manipulateur 31 du module de transfert
3 adjacent à l'ensemble d'évacuation est quant à lui
mobile entre une position dans laquelle il saisit le
tube cintré dans le module de cintrage 2 effectuant les
deux derniers cintrages et une deuxième position dans
laquelle il dépose l'élément cintré dans l'ensemble
d'évacuation 37. Chacun des autres modules de transfert
3 situés entre ces deux modules de transfert a son bras
manipulateur 31 qui est mobile entre une position dans
laquelle il saisit un tube à cintrer dans un module de
cintrage 2 amont et une position dans laquelle il
positionne le tube dans un module de cintrage 2 aval
pour assurer le transport du tube à cintrer d'un module
de cintrage amont vers un module de cintrage aval. On
notera que les pinces 13 et 33 doivent maintenir
fermement le tube pour empêcher que celui-ci puisse
pivoter. Il est en effet important que l'orientation
angulaire du tube autour de sa direction longitudinale
parallèle à l'axe de maintien 14 soit toujours connue
d'un module de cintrage 2 à l'autre car c'est elle qui a
conditionné le positionnement des vérins de cintrage.
Par ailleurs, on comprend que la décomposition
par modules de l'opération de cintrage autorise une
grande flexibilité d'emploi du dispositif. Ainsi, on
peut réaliser sur une même machine deux séries de tubes
ayant des géométries différentes en utilisant par
exemple un seul module de cintrage pour la réalisation
d'un des tubes et deux modules de cintrage pour l'autre
tube. Les modules de cintrage non utilisés pour un tube
ne servent pas, et sont inactivés (position reculée du
vérin rotolinéaire 22).
Alternativement, et selon un mode particulier de
réalisation (non représenté ici), le module de transfert
est composé d'un guide rectiligne sensiblement
horizontal placé au-dessus du ou des modules de cintrage
transversalement à l'axe de maintien, avec un chariot
monté coulissant sur ce guide et muni d'un moyen de
préhension pouvant se mouvoir verticalement,
conformément à un montage de type pont roulant ou
portique bien connu de l'homme de l'art.
Grâce à ce moyen de préhension, les tubes sont
transférés d'un poste d'alimentation en amont de la
chaíne vers le premier module de cintrage, puis de
proche en proche vers les suivants, et enfin vers un
poste de réception des tubes cintrés. Eventuellement, en
fonction de la nature des tubes à cintrer, le module de
transfert est capable de sélectionner le ou les modules
de cintrage sur lesquels s'effectuent les opérations de
cintrage, par exemple en sautant un ou plusieurs postes
de cintrage.
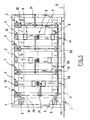
A la figure 5, on peut voir un dispositif de
cintrage dans lequel les longerons 5 s'étendent dans un
plan vertical de manière que les profilés support 14 et
28 soient verticaux. Le dispositif de cintrage repose de
préférence directement sur le sol S. On distingue
clairement le positionnement des organes de maintien 9
(représentés sous forme schématique sur cette figure)
par rapport à l'organe de maintien 8 de chaque module de
cintrage 2 permettant la réalisation des coudes à partir
des extrémités des tubes vers leur partie médiane
(l'amont et l'aval du dispositif se situent
respectivement sur la partie droite et sur la partie
gauche de la figure).
Le positionnement des vérins 22 dans chaque
module de cintrage est obtenu d'une part en réglant la
position des organes de cintrage 9 par rapport à
l'organe de maintien 8 et d'autre part en réglant la
position angulaire de chaque vérin 22 autour de l'axe de
maintien 14. Ce dernier réglage est effectué en
déplaçant le coulisseau 19 par rapport à la potence 15
et éventuellement en montant le vérin 22 sur l'autre
extrémité du coulisseau 19. La tête de cintrage 23 est
réglable angulairement autour de l'axe du vérin 22, de
façon à déterminer l'angle de cintrage à réaliser,
conformément à la technique de cintrage classique
utilisant ce type de vérin.
Bien entendu, l'invention n'est pas limitée au
mode de réalisation décrit et on pourra y apporter des
variantes de réalisation sans sortir du cadre de
l'invention tel que défini par les revendications.
On pourra prévoir que l'organe de maintien,
l'organe de cintrage et l'éventuel module de transfert
sont chacun motorisés et commandés de façon à ce que
leur position spatiale soit mémorisable dans le cadre
d'une commande automatisée du dispositif. On parvient
alors à faire coopérer tous les moyens ainsi pilotés de
manière automatique. En particulier, les
reconfigurations des organes de cintrage vis-à-vis des
organes de maintien peuvent être automatiquement
réalisées au cas par cas en fonction de chaque type de
tube à cintrer se présentant en amont de la chaíne.
En outre, des paires de vérins de cintrage
linéaires, disposés face à face ou côte à côte, pourront
être substituées aux vérins de cintrage rotolinéaires.
Dans ce cas, le cintrage rotatif par enroulement est
remplacé par un cintrage linéaire par emboutissage.
Enfin, chaque module de cintrage peut comprendre
deux organes de maintien associés chacun à un organe de
cintrage. Cette disposition est particulièrement utile
lorsque l'élément à cintrer comprend deux tubes
métalliques reliés l'un à l'autre par une conduite
intermédiaire flexible, selon un agencement bout à bout,
chaque organe de maintien assurant le positionnement
d'un des tubes métalliques. Lorsque la longueur de la
conduite flexible est susceptible de varier d'un élément
à cintrer à un autre, on peut prévoir de monter l'un des
organes de maintien et l'organe de cintrage associé sur
un chariot réglable en position le long du profilé
support. Il est en outre possible de commander
automatiquement les déplacements du chariot par
l'intermédiaire d'un capteur de mesure de la longueur de
la conduite flexible ou par tout autre moyen. Le module
de transfert pourra dans ce cas être agencé de manière à
comporter deux bras manipulateurs pour saisir l'élément
à cintrer par les tubes métalliques.