CN1126610C - 半导体自动处理设备和方法 - Google Patents
半导体自动处理设备和方法 Download PDFInfo
- Publication number
- CN1126610C CN1126610C CN99808318A CN99808318A CN1126610C CN 1126610 C CN1126610 C CN 1126610C CN 99808318 A CN99808318 A CN 99808318A CN 99808318 A CN99808318 A CN 99808318A CN 1126610 C CN1126610 C CN 1126610C
- Authority
- CN
- China
- Prior art keywords
- tray
- scale
- magazine
- belt
- wafer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67754—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber horizontal transfer of a batch of workpieces
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67769—Storage means
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67772—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving removal of lid, door, cover
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67775—Docking arrangements
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67778—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving loading and unloading of wafers
- H01L21/67781—Batch transfer of wafers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/135—Associated with semiconductor wafer handling
- Y10S414/14—Wafer cassette transporting
Abstract
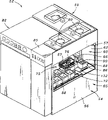
安装在净化室(54)中的自动半导体处理系统有一个垂直相对于处理舱(94)的度盘舱(75)。在度盘舱中的度盘(72)为处理过程中的半导体晶片提供堆放或存储功能。处理室(68、70)位于处理舱中。处理机械手(66)在度盘舱和处理舱间运动,以从处理室往返搬运半导体晶片。处理机械手有沿提升杆(254)垂直移动的机械臂(255)。半导体晶片偏离机械臂搬运以进一步避免污染。这是一款紧凑的,需要较小净化空间的自动系统。
Description
发明领域
本发明领域是用来处理半导体晶片,硬盘介质,半导体衬底和要求极低污染级类似材料的自动半导体晶片处理系统。
发明背景
计算机、电视、电话和其它电子产品包含大量的基本半导体电子器件。为了生产电子产品,要在很小的空间里使用光刻技术在半导体衬底,例如半导体晶片上制造成百上千的半导体器件。由于在制造半导体器件中牵涉极小的几何尺度,在半导体衬底材料上的污染物,如尘埃、污垢、油渍、金属等都将产生最终产品中的缺陷。
为避免污染物,要在净化室中处理半导体衬底。净化室是为避免污染而设计、装有半导体制造设备的封闭区域或空间。馈入净化室的空气经过充分的滤清,以避免周围空气污染净化室。要使用特殊的材料和设备保持净化室的污染在可接受的低水平上。因而净化室的建造和维护可能是费时和价格高昂的。净化室中的半导体处理设备应尽可能紧凑地安装,这就需要使大量的半导体晶片能在一个较小的空间中处理,从而减小空间和降低费用。当然,这也就需要较小的半导体处理设备,以降低对净化室空间的要求。
有的自动半导体处理系统用机械手递送半导体材料。所设计的这些机械手能避免产生污染半导体的微尘。但即使经过精心选择材料和设计机械手的操作,机械手的运动部分仍会产生微尘。因此,需要改进处理极低污染级半导体衬底材料的技术,以把缺陷保持在可接受的水平。
发明概述
在发明第1方面,自动半导体加工处理系统在箱体中有一个度盘舱或空间和一个处理舱或空间。该度盘舱与处理器舱垂直相对,构成净化室所要求的紧凑型较小空间设计。
在发明第2方面,度盘舱中有一个度盘。该度盘主要装有多个货盘,以支撑放置在料盒中的半导体晶片。度盘舱中的货盘搬运器移动货盘和料盒,依次从度盘加载位置,通过多个中间存储位置,直到度盘的卸载位置。通过移动和存放料盒,度盘让自动半导体处理系统连续运行。
在发明第3方面,货盘搬运器包括一个x-轴和y-轴移位系统,以在度盘中纵向和横向运动货盘。为避免相对于传动带的不经意货盘运动,y轴移位系统有一对齿条啮合在货盘底部的架子上。
在发明第4方面,货盘上的棱镜折射来自传感器对的光束,以检测货盘上是否有料盒,或料盒中是否有晶片。
在发明第5方面,自动半导体处理系统中的处理机械手有一条能沿提升导轨垂直运动的手臂。该机械臂有延伸到臂肘关节和手腕关节间的前臂段。在机械臂上的晶片支架横向偏离臂肘关节和手腕关节。该机械臂是紧凑的,但有可扩展的行程范围。因此处理系统只需要较小的空间。
在发明第6和单独方面,一块可移动的缓冲隔板放在度盘上方,以提高系统的产出率和通用性。
在发明第7和单独方面,新颖的处理舱舱门能更好关闭和密封处理舱。
在发明第8方面,组合上面所讨论的两种或多种功能特性,以提供改进的自动半导体处理系统。
本发明的一个目标是提供自动半导体处理系统,经更好的设计使半导体晶片免受污染。
本发明的进一步目标是提供通用的,但也是紧凑的自动半导体处理系统,以减少对净化室空间的要求。
其它目标,功能特性和性能优点在后面叙述中将是很显见的。
附图的简要说明
在所有图中,同样元件用同一参考号标注:
图1是自动半导体处理系统顶、后、左向轴侧示图;
图2和图3是它的前、顶、左向轴侧示图;
图4是它的正立视图;
图5是它的左视图;
图6是图3所示机械手进/出的前透视图;
图7是它的后透视图;
图8是图1-3所示度盘的透视图,以更清楚表示各种可运动结构件;
图9是更清楚显示其它可运动结构件的透视图;
图10是显示其它细节的另一张透视图;
图11是图1-3所示度盘的左视图;
图12是它的平面图,以更清楚表示运动度盘上的货盘;
图13是图1-3所示度盘的前视图;
图14是图1-3所示度盘的平面图,以更清楚表示运动顺序;
图15是图5所示升料机在较低位置时的透视图;
图16是升料机在升高位置上的透视图;
图17是图2和图5所示处理机械手的前透视图;
图18是它的平面图;
图19是它的放大平面图;
图20是处理机械手的臂完全缩回时的后透视图;
图21是它的平面图;
图22是处理机械手断面的侧立视图;
图23是处理机械手的前透视图;
图24A-24E是用图形方式表示处理机械手的各种手臂位置;
图25是图3-5所示处理舱的透视图;
图26是图4,图5和图25所示半导体处理舱的透视图,并带有新颖的门传动和密封机构;
图27是处理舱舱门传动组件的透视图;
图28是处理舱舱门在开启位置的剖面图;
图29是处理舱舱门在关闭位置的剖面图;
图30是第二个度盘实体装置的透视图;
图31是图30所示度盘的反向透视图,以更清楚表示各种可运动结构件。
附图的详细说明
综述
现在详细说明图1-5所示的附图,自动半导体材料处理系统50装在净化室52中。系统50有一个空气净化箱或室54,其左侧墙56上有固定透明窗57,从而能观察室54中的工作情况。同样如图2所示,室54有前墙58,它带有固定透明窗59。
前墙58中的上载/卸载口60在系统50工作时,由图2所示的透明上载窗或板62关闭。参看图1-5,室54顶部为风扇或风机80,它连续把清洁空气送入箱内。设备箱82提供放置电源、试剂槽、泵和半导体处理所需其它部件的空间。
前墙58上的用户接口64为系统操作人员提供信息和输入控制指令。用户接口接到设备箱82中的,或在远处的计算机/控制器85。计算机/控制器85连到将在下面说明的各种电机和传感器,以及设备控制计算机,用来控制系统50的工作。
参看图1-4,特别是图3,系统50包括一个度盘舱或空间75,它沿左侧墙56向后延伸。处理舱或空间94沿垂直于度盘舱75的前墙延伸。度盘舱或空间75与处理舱或空间95彼此相通,如图3所示,分开的间隔只是为了叙述方便。参看图1-5,上载/卸载窗60通过室54的前墙58打开度盘舱75。度盘舱75中的I/O机械手86位于窗口60的下面。
度盘舱75中装有度盘72,它通常与窗口60对准。度盘72上的输入板132从I/O机械手86上面对着窗口60。度盘72能很好容纳装有平面介质,也就是硅晶片90的8个料盒88。料盒搁在位于度盘72上面的货盘136上。货盘136和I/O板132垂直放置,与窗口60的底部高度大致相同。运动缓冲架在分度舱72上料盒88的上面,通过垂直缓冲挡板130从分度舱72的中梁条向上延伸。
参看图2、3、4,处理舱95包括2个或多个处理室。更具体地说,处理室是一个化学处理室68和一个离心/冲洗干燥器70。处理机械手通过处理舱95移动到度盘72,把晶片90取出或放入箱68或70中。
参看图3和图5,以及图15和图16,度盘72下面的升料机78从料盒88(同时上载两个料盒)托出晶片90,使晶片能由处理机械手66拾起和运走。如图16所示,每一个料盒88能装25个晶片,度盘72把握8个料盒的能力使它总共可装200个晶片。以50个晶片为一组处理,升料机78和处理机械手66同时运送2个料盒的晶片。
I/O机械手
参看图6和图7,I/O机械手86有一个连接左侧板56或相邻箱体结构的安装板110。安装板110装在y轴支撑导轨112上。导轨112上的线性传动器114移动y方向的电枢105,如图3和图6所示。
参看图7,在电枢105后面的x轴导轨106支撑着Z轴或垂直叉指形导轨102。垂直叉指传动器102在电枢105上垂直移动导轨102。x轴传动器108在x或横向上,与垂直传动器104一起移动垂直导轨102。料盒叉指100靠着垂直导轨102的顶部,能插入料盒侧面法兰89提升料盒88。
度盘
现在转到图8,度盘72有一个长方形框架118,它包括底板120,前板122,后板124,左侧板126和右侧板128。I/O板132接在右侧板128上,由三角片134支撑。中梁160把度盘分成输入行或输入边135和输出行137。垂直缓冲支持挡板130放置在中梁160中间的缓冲板滑槽144中,并能前后运动。两根相对的货盘导轨142从左侧板126延伸到右侧板128,货盘坞或表面139提供货盘136的放置和支撑面。参看图14,度盘72包括10个货盘位置:A,B,C,D,E,F,G,H,I和J。度盘72有8个货盘136,所以两个对角的位置总是空的。翻到图12,断路器162位于度盘72的底板120中的位置C和H,能让空气通过度盘72向下流动。升料机间隙孔164在I和J处,它穿过底板120,提供升料机78的间隙。
继续参看图8-14,度盘72包括x轴或横向移位系统或组件,通常标注为140。以及y轴或纵向移位系统或组件,通常标注为170。这些移位系统把载有料盒88的货盘136在度盘72上移动,如图14所示。
参看图9,横向移位系统140包括固定在度盘框架118上的横向引导块150。横向移位末端叉指146A支撑在横向引导块150上,由横向驱动电机154在位置E和F间步进或依序驱动,如图14所示。末端叉指气缸152在由机械停止器确定的上升下降位置升降末端叉指146A。图9和图10示出横向移位系统在度盘左端或内侧端的部件。类似的或同样的部件(横向引导块150,叉指146B和横向气缸152)以相同方式安装在右端。横向移位系统连接传动带156环绕度盘框架118延伸,它由惰轮157支撑,能依附对角末端叉指146A和146B。当给横向驱动电机154加电时,叉指146A从位置F移到位置E,末端叉指146B同时从位置A移到位置J,或反方向进行。
继续参看图8-14,度盘72的纵向或y轴移位部件170包括平行延伸到前后板122和124,或中梁160任一边的水平导向轨172。8个侧边叉指180B-180J放在位置B,C,D,E,G,H,I和J,从图12能看得很清楚。侧边叉指传动器或气缸174能配属给8个侧边叉指180中的任何一个。气缸174在水平导轨172上前后运动时,不能用侧边叉指180水平定位。8个侧边叉指180由水平驱动传动带178连到一起。水平驱动传动带178沿度盘框架118伸展,并由惰轮支撑。水平驱动传动带178放在度盘框架118中横向驱动传动带156的上面。给纵向或y轴驱动电机176加电,以驱动传动带178,它带动电机176的执行,使所有8个侧边叉指同时运动。参看图12,当电机在I方向驱动输入行的侧边叉指180B-180E时,中梁160B对面输出行137中的侧边叉指180G-180J在O方向移动。
参看图8-11,度盘72也包括缓冲架移位系统或组件,通常标注为190。该缓冲移位系统190移位垂直缓冲挡板130,它从图9所示的前面位置到图8所示的后面位置支撑缓冲架76。图8中以虚线表示的缓冲架76在其它图中被省略,以得到更清楚的示图。
参看图10,缓冲移位系统190包括缓冲驱动电机198,它通过挠性连轴节196接到缓冲器驱动传动带200和主动轮192。缓冲驱动传动带200环绕主动轮192和位于缓冲板槽144对面的缓冲传动带惰轮194。垂直缓冲挡板130可保障缓冲驱动传动带200的安全。垂直缓冲挡板130的底端能滑到缓冲挡板槽144下面的缓冲挡板导轨202。
度盘72在每一A-J位置有3套传感器138。各位置上的这3套传感器可以是分立的单独传感器,也可以是单一的组合传感器。各位置的传感器能检测是否存在货盘;在货盘上是否有料盒;以及在料盒中是否有晶片。这些传感器连接到控制器或计算机,提供度盘72中各位置的状态信息。最好使用光传感器。
现在转到图15和图16,升料机78有一个与电枢212相连的电机210,它通过引导螺栓或其它旋转装置转为线性驱动。电机210的执行装置沿升料机导轨提升电枢,它垂直移动晶片90,将其送入料盒80,或从料盒中取出。图16示出从料盒88中取出晶片90,这些晶片可由处理机械手66拾取。
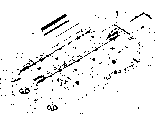
处理机械手
现在翻到图17-23,处理机械手66包括横向或x轴导轨250,它穿过加工处理舱95,有一部分进入度盘舱75。提升单元252能沿着横向导轨250运动,并受磁流线性驱动电机251驱动。机械手手臂255接在提升单元252的垂直提升导轨254上。一个交流提升电机257在垂直方向上沿提升导轨254移动机械手手臂255。如图23所示,瓦斯弹簧计数平衡器278的气缸280接在机械手手臂255上。活塞282把气缸280推至提升单元252。该瓦斯弹簧计数平衡器在机械手手臂255施加向上的恒力,以减少提升电机257运动或定位机械手手臂255所必须的提升或制动力。
继续参看图17-23,机械手手臂255在臂肘室258中有一个臂肘驱动交流电机259。臂肘室258靠着提升单元252提升导轨254的滑道。前臂260通过臂轴关节256接到臂肘室258。前臂260通过齿轮减速261与臂肘驱动电机259实现机械连接。
手腕驱动交流伺服电机265装在手腕室264中,它通过腕关节以能旋转的方式接到前臂260的外端。晶片托架268由相对的底端卡子270构成,它位于手腕室264的正下方。底端卡子中的凹槽274用来放置、提升和搬运晶片90。遥控摄影镜头266放置在手腕室264的顶部,并链接到计算机/控制器85,用来观察加工处理箱中机械手上的晶片容器位置,如美国专利5,784,797所述。然后,计算机/控制器就能确定加工处理机械手能否把晶片正确插入到处理箱中。摄影镜头266也用于验证在处理箱中的处理开始前,转子是否已完全锁定。
用于驱动手腕驱动电机265,臂肘驱动电机259,提升电机257和横向驱动电机251的电机放大器275放置在提升单元252中,并随提升单元运动。把电机放大器放置在提升单元252中减少了对空间和电缆的要求。
处理舱
现在翻到图25,在处理室95中的处理舱300包括离心/冲洗干燥器70和化学处理室68,虽然也可使用其它舱或另外增加舱。加工处理舱300前隔板提供最终冲洗干燥器302。
参看图26-29,处理舱300包括一个处理罐310,它有一部分在处理钵314中。处理罐310与可运动的舱门512相配合,该舱门可在图26实线所示的关闭位置与虚线所示开启位置间运动。
参看图26和27,舱门组件500所在位置与处理罐310前板502平行。
舱门组件500包括支撑舱门512的门板510和舱门传动器514。舱门512包括带有观察窗508的硬板504,能用来检查处理钵或处理室314。舱门传动器514包括固定外圆筒516及相连的门支撑板510,以及扩展环518。扩展环518与外圆筒同心,并可在其内部滑动。舱门支撑板510包括对准窗508的观察孔520,在关上时,能看到里面的处理室。
参看图26和图27,舱门支撑板510接在可滑动的导向架522上。圆筒524通过安装板528接在处理罐的前板502上。导向架522,圆筒524和安装板528共同提供了坚固的舱门安装结构,而不需要另外的导轨或支撑块。导向架522用于垂直运动,因而舱门组件能在允许从处理罐存取材料的开启位置与对准处理钵314的关闭位置间运动。在关闭位置,舱门可以密封处理钵314。
参看图28和29,环形的内套筒530有环形法兰532和外圆筒534。环形法兰532接在舱门支撑板510上。多个连接件保证了外圆筒环516、环形法兰532与安装板510同心。
扩展环518与套筒530、外圆筒环516同心,并在这两者之间,它包括用来定位环形导向座520的U形部分519。圆筒534正好能放在环形导向座520内。扩展环518也包括环形端面540,如图28所示。扩展环518不能放置由圆筒534和其它圆筒环定位的环形室542,以密封和启封钵314。
扩展环518把室542分成两个工作部分:回收室543和扩充室544,以在各室内增加或降低流体压力,完成扩展环518的运动。如图28所示,当向扩充室施加液压流体时,扩展环519进入图28所示的延伸位置,舱门512通过接入处理钵的开启处506,而将处理舱300密封。
环形门封551装在门512的周围。门封包括唇边522和舌片554。当门处于图28所示的关闭位置时,门封的唇边522在处理器前板内的平面上,舌片则压在处理钵314的外缘,保证了门512与处理钵314间的密封。门封也包括阻塞门封的法兰555。
延伸环518和门封500在一起,提供极为可靠和高效的关门和密封机构。环518类似于活塞的运动能把没有钵或带的支撑板直接向外运动,而不需要确保平稳运动的外部调整。通过密封处理钵的外缘,舌片提供了高效率的紧密封,并自动填补舱门和处理室间的任何错位。
内套筒530和外圆筒510牢固地接在门板510上。处理钵通过与门板510的连接接到圆筒524,然后是前墙502上。随着扩展环从门板510离开,它能紧紧地压住和密封钵514。
运行
在使用中,系统50的操作者通过在用户接口64上送入命令而初始化上载序列。窗口板62降下,从而打开上载窗口60。操作者把装有晶片90的料盒88放到I/O板132上。在开始时,可通过人工操作或另一个机械手把料盒88放到I/O板132上。在I/O板中的停车装置133定位料盒88,因而可以由I/O机械手提起,并允许空气在料盒88中的晶片90上通过。
I/O机械手86的叉指100最初置于与I/O板132相同的x-y位置。垂直叉指电机或执行器14提升叉指100,直到该叉指能抓住料盒88的侧面法兰89。然后,I/O机械手86垂直提升料盒88,使其离开I/O板132,通过横向电机108的激励,横向移动(x方向)到左侧墙56。这一移动把所提升的料盒与度盘输入行对准。接着I/O机械手86通过y轴电机114对着度盘把料盒纵向(y方向)提升,直到该料盒对准位置A中一个货盘的上方。然后I/O机械手把料盒88放到度盘72位置A的货盘136上。如果在位置A没有货盘,必须按如下所述先排好度盘72的顺序,把货盘送入位置A。I/O机械手随后把叉指100返回它的初始位置。
放在位置A货盘136上的第一个料盒88位置就是料盒的上载位置,纵向移位系统170运动侧边叉指180B-J(图12中的箭头O方向),直至侧边叉指180B到达位置A的货盘136及料盒88的下面。在侧边叉指180B-J向下或待命位置下面是终端叉指146A和146B的向下或待命位置,因而侧边叉指180B,180E,180G和180J能运动到最终位置A,E,F和J,而不会干扰终端叉指146A和146B。当所有侧边叉指180B-J接到纵向驱动带178时,它们都会在y方向一起运动。
使用位置A中第一个料盒88下面的侧边叉指180B,就使8个侧边叉指空气传动器或气缸174伸展,使侧边叉指180提升货盘,从而离开货盘坞139。通过处于上升位置的货盘,纵向驱动电机176以反方向转动,把货盘上载有第一个料盒88的侧边叉指180B从位置A移到位置B。在完成这一运动后,位置A就没有货盘。由于控制所有的侧边叉指传动器174同时运动,因此所有的侧边叉指180B-J必须在垂直Z轴方向一起运动。
继续上载或依次使用度盘72,纵向驱动电机176再次把侧边叉指180B移回位置A,因而也把侧边叉指180J从位置J移回位置I。在这一运动过程中,侧边叉指气缸174下降,因而没有货盘的运动。当然,侧边叉指很难再位于货盘下方。侧边叉指在这一步运动中要避免干扰端面叉指,而不必是一个完善的位置。随着侧边叉指146B现在腾出了位置J,横向驱动电机154把终端叉指146A从位置A移到位置J,并同时把终端叉指146A从位置F移到位置E。当在位置J下面时,横向气缸152延伸,提起终端叉指146B和在位置J的货盘,并同时提升叉指146A,以举起位置E的货盘。然后横向驱动电机154反向旋转(图12的L方向)通过横向传动带156,把载有货盘的终端叉指146A从位置E移到位置F。然后缩回横向气缸152,降低货盘进入度盘舱的位置A和F。
对于在位置A上的第二个货盘,度盘72能接收第二个料盒88。在第二个料盒定位于I/O板之后,I/O机械手86重复料盒运动的度盘上载序列,因而能把第二个料盒放在位置A的度盘上。
重复前述的步骤,直至料盒上载到度盘8个货盘中的一个货盘上。由于度盘有10个位置A-J和8个货盘,因而任何时候在对角线上的位置A和F,或位置E和J将没有货盘。
当度盘72中的第一个和第二个料盒88到达位置I和J,加电的升料机78通过料盒88打开的底部把在提升柱214上的晶片平台216提升。料盒中的晶片被提升到提升器的送入位置,如图16所示,这些晶片现在可由处理机械手66拾取。
现在参看图20,21和24B,处理机械手66取出升料机78中的晶片90。横向驱动流量电机251横向移动提升单元252,直至晶片托架268正确对准升料机78上的晶片90。通过相应控制提升电机257、臂肘驱动电机258和手腕驱动电机265,就能移动晶片托架268,直到定位于端面操纵装置270和对准晶片的任一面,端面操纵装置带有凹槽274,可对准接受晶片。如图24B所示,这一晶片交接运动是机械手的手臂255的低手运动。晶片托架268向上运动,从升料机78中取出晶片90。然后机械手的手臂255缩回到图24C所示的位置。由于前臂有370°的运动范围,机械手的手臂255能脱离提升单元,完全从度盘返回,而只需要最小的间隙,如图20和21所示。通过相应控制机械手手臂中的电机,晶片就能保持垂直或接近垂直的位置。
为把晶片90送到处理室,横向驱动电机251运动提升单元252,使晶片托架268中的晶片对准所选的处理室。机械手的手臂255通过提升电机257举起提升单元。此外,前臂260通过臂肘驱动电机257保持向上的方向。手腕驱动电机同时在反方向驱动,使晶片托架处于大约向下倾斜10°的方向,如图22所示。使用如图24A所示的高手运动,前臂往下伸展,把载有晶片的晶片托架送入处理室。然后机械手的手臂255从处理室缩回。
为清洁端面操纵装置270,控制手腕驱动电机265把端面操纵装置置于图24D所示的垂直方向。端面操纵装置对准端面操纵装置冲洗干燥器302。在对端面操纵装置清洁和干燥后,从端面操纵装置清洁干燥器缩回,从而可从任一处理室移送晶片,或从度盘拾取另一组晶片送至处理室。由于端面操纵装置是在处理室,而不是在其它地点进行清洁处理,完成这一清洁步骤不需要运动处理机械手,因而可以减少处理时间。
由图23可见,晶片托架268与手腕关节262及臂肘关节256及处理机械手66的其它部分有一偏距。处理机械手66没有任何部分直接定位在晶片上面。由于处理室54中的空气是向下吹过,处理机械手66所产生或放出的任何微尘都不会与晶片接触。从而减少了处理过程中晶片可能遭受的污染。
参看图24A-24E,处理机械手66有与臂肘关节256和手腕关节262相连的一个臂段或前臂260。因此与有肩、肘和腕关节及相连两个臂段的系统不同,处理机械手通过机械手的手臂在提升导轨254上的运动,而不是通过手臂段的关节实现垂直到达范围。这就使处理机械手结构紧凑,同时能实现足够的运动范围。从而使整个处理室54能非常紧凑。
由于处理机械手能执行低手和高手运动,就限定了提升导轨254所需的垂直行程。此外,执行低手和高手运动的能力能允许相对短的前臂260,从而也对紧凑的处理室54作出贡献。
参看图1和图16,当升料机78在下位置时,缓冲架76向前运动(图17中的方向O),以接受50个晶片。缓冲架76拿住晶片,直到相应的空料盒88移到I和J位置。当缓冲架76未上载或未用晶片上载时,它逗留在返回位置(以方向I运动),因此不会干扰升料机78的工作。缓冲架76暂时拿住已处理的晶片,因而处理机械手能在把经处理的晶片送回度盘前,先拿过和移动下一批晶片,把这些晶片送入处理室。这就保证了连续向处理室提供要处理的晶片。
第二个度盘实施例
如图30和31所示,第二个度盘600包括由侧墙604和606,前墙608,后墙610及底板612构成的盒子602。输入板614从前墙608向外延伸。中隔墙616和横向镶条666把度盘600分成第一行R1和第二行R2,每一行都有5个货盘位置或站点,也就是图12所示的A-E和F-J。中隔墙通过支撑条615放置在盒子602中,支撑条从中隔墙延伸到侧墙604和606。
参看图30,缓冲组件618包括靠着内侧墙606的缓冲侧板620。缓冲托架622有在梳臂620上的梳624。缓冲托架622由缓冲托架柱630支撑。托架柱630能在缓冲侧板620上的632和634上下两条缓冲导轨上滑动。托架柱630上的线性轴承636能让托架柱630沿导轨632和634进行低摩擦力的运动。
缓冲驱动传动带环绕缓冲驱动电机638和终端滑轮640。缓冲驱动传动带靠着缓冲托架柱,因而电机638的旋转运动传换成缓冲托架柱沿导轨632和634的运动(y轴)。如图30所示,装在度盘600侧板上的缓冲组件与图8所示位于中心的第一个度盘缓冲组件72相比,有更为紧凑的设计。
参看图30和31,度盘600包括通常标注为650的纵向或y轴移位组件,以及通常标注为652的横向或x轴移位组件。
参看图31,y轴移位组件650包括两个并排或平行的y轴框架660。每一个y轴框架660包括靠着中隔墙616的内侧框架板662,以及在侧墙604和606上的外侧框架板664。横向镶条666架在y轴框架660的内侧框架板662和外侧框架板之间。
终端滚轮装在内外框架板662和664的终端处(总共8个终端滚轮674)。惰轮676相互隔开,安装在终端滚轮674间的框架板662和664上。齿形传动带670装在框架板662和664的终端滚轮674和惰轮676上(总共4条齿形传动带)。传动带670上的齿形面朝外,因此传动带用平滑的内面或后面与终端滚轮674及惰轮676接触。为清楚说明,仅画出传动带670的部分齿672,实际上传动带670有连续的齿形。此外,图31中未画出前面的滚轮和传动带。
还参看图31,装在中隔墙616上的y轴驱动电机680连接和驱动齿轮组682,齿轮组接着驱动反向而等速的转轴684A和684B(并排放置在y轴框架中)。驱动转轴684A和684B接着驱动卡轮686,然后驱动传动带670。传动带670的外部齿形面绕过驱动卡轮686和惰轮688,如图31中的虚线所示。
如图31所示,由横向镶条666确定的10个货盘站点或位置A-J中的每一个位置提供x轴传感器对690和y轴传感器对696。x轴传感器对包括一个红外发射器692和一个红外探测器694,彼此间横向对准(在垂直于框架板662和664的线上)。同样,y轴传感器对696包括一个y轴红外发射器698和一个y轴红外探测器700,它们通常位于横向镶条666的中心,并且彼此对准(在平行于框架板662和664的线上)。
在各货盘位置A-J的侧墙604和606上有反射光传感器702,传感器对690,696和光传感器702均接到监视和控制度盘600工作的控制器85上。
回到图30,在度盘600的R1和R2行提供8个矩形货盘710,因而每一行的4个货盘位置总是被货盘710占用,靠着端面墙608或610的终端位置总为空。每一个货盘都有矩形的货盘切口或开口712。如图30虚线所示,货盘710底面上有货盘齿条715。齿条715在货盘较长的两面延伸。齿条715的尺寸与间距与传动带上的齿形672一致。因而当货盘712放置在y轴框架660上时,货盘齿条715的齿正与传动带670上的齿672啮合,因此货盘锁住相对于传动带670的y轴运动。
各度盘均有一对x轴和y轴棱镜。x轴发射器棱镜714纵向对准各货盘710上的x轴探测器棱镜716,如图30所示。同样,y轴发射器棱镜718横向对准各货盘710上的y轴探测器棱镜720。货盘710在度盘600中10个货盘位置A-J的任何一个位置上,x轴发射器棱镜714与x轴探测器棱镜716垂直相对,并分别对准货盘位置中的x轴红外发射器692和x轴红外探测器694。同样,y轴发射器棱镜718与y轴探测器棱镜720垂直相对,并分别对准货盘位置中的y轴红外发射器698和y轴红外探测器700。
参看图31,惰轮676有在传动带670上垂直伸出的惰轮法兰678。惰轮法兰676啮合在各货盘710底面上的惰轮凹槽中(如图30中的虚线所示)。惰轮法兰678插入凹槽675能防止货盘的任何x轴运动(除非货盘710被垂直提升)。因此货盘710由传动带710和惰轮法兰678支撑。
度盘600有一个x轴移位组件652,它与图9和图10所示的x轴移位组件或移位系统140大致相同,因而在这里不再进一步说明和绘出。但与x轴移位系统140中使用终端叉指气缸不同,度盘600中的x轴移位组件652有一个货盘提升电机654,它能更好地控制货盘的提升运动。
度盘600的操作步骤类似于上面介绍的度盘72,可参看图8-12。但货盘沿y轴的运动是通过用计算机控制器控制y轴驱动电机680实现,它使传动带增量运动或增加刻度。在y轴运动期间,货盘710保持在传动带670和惰轮676上。与度盘72不同,在图30和31所示的度盘600中,货盘710没有垂直运动,货盘在货盘位置间的y轴方向运动。
在度盘600终端处,货盘710的x轴运动类似于上述度盘72的运动,因此这里不再进一步说明。
在各货盘位置,光传感器72通过检测是否有反射光,探测货盘710是否存在。此外,在各货盘位置A-J,x轴传感器对690探测料盒88是否存在。特别是用红外发射器692垂直向上投射光束。该光束通过各货盘710上的x轴发射器棱镜714,它把光束折90°,因而使光束水平向内投射到x轴探测器棱镜716。如果在货盘710上有料盒88,光束将被料盒88挡住。另一方面,如果货盘710上没有料盒88,从发射器692发出的红外光将通过x轴发射器棱镜714,通过货盘710,再通过x轴探测器棱镜716重新向下,因而红外光能到达和被x轴红外探测器694检测到,说明存在料盒88。
y轴传感器对696用类似方法工作,以探测料盒88中是否有晶片。对于货盘710上的料盒88,y轴发射器698发出的红外光垂直向上投射,由y轴发射器棱镜旋转90°,使光线通过料盒88底部的缝隙或孔道725。如果在料盒中没有晶片或其它平面介质,光线将通过孔道725,由y轴探测器棱镜720重新转到向下方向,而被y轴探测器700检测到,说明在料盒88中没有任何晶片。如果在料盒88中有晶片,晶片的底部将会挡住孔道725,使光线不能通过该孔道。因而料盒88中存在的任何晶片都将挡住y轴发射器698发出的光线,y轴探测器700检测不到光,就说明在料盒88中至少有一块晶片。
度盘600中缓冲组件618的工作也类似于上面图8示出的缓冲组件76。但能对位于度盘600侧面的缓冲组件618实现更紧凑的设计。与图8-16所示的度盘72相比,用传动带670提供更快和更可靠的货盘运动。使用棱镜714-720探测料盒和晶片,就不需要提升货盘。
Claims (35)
1.一种处理半导体晶片和平面介质材料的机器,包括:
一个箱体;
箱体中的一个度盘,该度盘包括:
一个第一轴移位组件;和
一个第二轴移位组件,该第二轴移位组件包括第一对和第二对传动带;
至少要有间接连到第一对和第二对传动带的电机,以同时在相对方向驱动第一对和第二对传动带;和
传动带上至少能支持几个货盘。
2.根据权利要求1所述的机器,其中传动带是无接头的齿形传动带,每一个货盘至少有一个齿啮合到该无接头的齿形传动带上。
3.根据权利要求1或2所述的机器,该机器还包括几个分开的、支撑第一对和第二对传动带的滚轮,这些滚轮有上举这些传动带的法兰,滚轮的法兰至少能部分支持几个货盘。
4.根据权利要求1或2所述的机器,其中每一对传动带连续延伸到几个货盘站点,货盘可以在度盘站点间的传动带上运动,而不必从传动带上提起货盘。
5.根据权利要求1所述的机器,该机器还带有接到度盘一侧的一个缓冲组件。
6.根据权利要求5所述的机器,该缓冲组件还包括一个靠在度盘上的缓冲挡板,一个缓冲滑道靠着该缓冲挡板,一个缓冲托盘可在该缓冲导轨上滑动。
7.据权利要求6所述的机器,该滑道平行于传动带。
8.根据权利要求1所述的机器,至少在一个货盘上有一对棱镜。
9.根据权利要求1所述的机器,该机器在第一对传动带下面的度盘中还包括第一个站点,第一个站点中有第一对传感器,至少在一个货盘上有第一对棱镜。
10.根据权利要求9所述的机器,该机器在第一个站点中还包括
货盘传感器,用于检测在第一站点是否存在货盘。
11.根据权利要求10所述的机器,该机器在第一个站点中还包括第二对传感器,至少在一个货盘上有第二对棱镜,第二对棱镜对着第二条线,第一对棱镜对着第一条线,第二条线垂直于第一条线。
12.根据权利要求1所述的机器,该机器还包括在第一轴移位组件中提举出第一对传动带上的货盘,把它放到第二对传动带上的装置。
13.一种处理包括半导体材料的晶片的平面介质的机器,包括:
一个度盘架;
在度盘架中至少有一条齿形传动带;
连接到至少一条齿形传动带的电机;和
至少部分支持货盘的齿形传动带,货盘至少有一个齿啮合到一条齿形传动带上。
14.一种处理包括半导体材料的晶片的平面介质的机器,包括:
一个度盘;
该度盘中的一个y轴移位系统;
该y轴移位系统支持几个货盘;
至少在一个货盘中有第一对棱镜;和
与第一对棱镜一起的第一对传感器。
15.一种为保存和处理放在货盘上料盒中的包括半导体材料晶片的平面介质的机器,包括:
在第一个方向上运动货盘的第一轴移位系统;
在垂直于第一方向的第二方向上运动货盘的第二轴移位系统;
至少与第一轴和第二轴移位系统之一一起的数个货盘站点;
各货盘站点上的料盒传感器;
各货盘站点上的平面介质传感器;
各货盘上的料盒传感器棱镜对;和
各货盘上的平面介质传感器棱镜对。
16.一种处理包括半导体材料晶片的平面介质的方法,包括如下步骤:
把装有平面介质的料盒放到货盘上;
把该货盘放到度盘中第一条传动带上的指定位置;
分度第一条传动带,在度盘内的第一方向上把货盘从第一货盘站点增量运动到第二货盘站点,而货盘继续保持在第一条传动带上;
从第一条传动带上垂直提起货盘;
把货盘沿垂直于第一方向的方向运动到第二条传动带上的位置;
把货盘放到第二条传动带上指定位置;和
分度第二条传动带,在相对于第一方向的第二方向上增量运动货盘,而货盘继续保持在第二条传动带上。
17.一种处理半导体材料的设备,包括:
一度盘舱;
此度盘舱中的一度盘,此度盘具有多个为保持料盒的顺序位置;
此度盘中的一驱动系统,用于顺序移动料盒通过顺序位置,这些顺序位置被配置在至少二相临边的列中,而此驱动系统包括为在度盘上纵向移动料盒的第一水平轴位移系统和为在垂直于纵向的横向上移动料盒的第二水平轴移动系统;
一垂直接合进度盘舱的处理舱;
在此处理舱中的至少一个处理室;和
可在度盘与此至少一个处理室之间运动的处理机械手。
18.根据权利要求17所述的设备,其中处理室的设备放在离心冲洗干燥器或化学处理室中。
19.根据权利要求17所述的设备,还包括一个接近机械手上的终端操纵装置。
20.一种处理半导体晶片器件的设备,包括:
一具有多个料盒存放位置的度盘;
在度盘中的料盒前移系统,用于顺序前移料盒通过此多个料盒存放位置;
在一阵列中边靠边地布置的多个处理室,此阵列与度盘相垂直以使得设备紧凑;和
为在度盘与处理室间运动的处理机械手,此机械手包含有:
用于垂直移动终端操纵装置的提升导轨和提升电机;
通过臂肘关节附着到提升导轨的机械臂;和
一腕关节,附着到此机械臂并将终端操纵装置支撑到提升导轨和提升电机的一侧,以使得机械手能利用上手和下手运动将料盒放入和移出料盒和处理室。
21.根据权利要求17所述的设备,还包括与度盘结合的输入/输出机械手,用来上载和卸载度盘中的晶片。
22.一种为处理半导体晶片器件的设备,包括:
一具有多个货盘存放位置的度盘;
用于支撑料盒的货盘,基本上在每一货盘存放位置具有开口的中心区;
度盘中的货盘前移系统,依靠在第一方向和与第一方向垂直的第二方向上移动货盘来顺序前移支撑料盒的货盘通过度盘中的多个货盘存放位置,其中货盘能与货盘前移系统分离以使得货盘能通过度盘随料盒移动;和
多个在一阵列中边靠边地布置的处理室,此阵列与度盘垂直以使得设备紧凑。
23.一种为处理半导体晶片的方法,包括步骤:
把一装有晶片的料盒传送到处理设备的装载站点;
在度盘中第一列料盒位置中以第一方向增量地前移料盒,然后在垂直于第一方向的第二方向上将料盒移动进度盘中的第二列料盒位置;
从料盒中取出晶片;
将晶片送入处理室;
将晶片插入处理室;
在处理室中处理晶片;
将经处理的晶片由处理室取出;
将经处理的晶片送回到度盘;
把经处理的晶片置于缓冲架上;和
由设备取出经处理晶片。
24.根据权利要求23所述的方法,还包括在拿出晶片时的第一位置,和接收经处理晶片的第二位置间移动缓冲架的步骤,在这一步骤中把经处理晶片放到缓冲架上。
25.根据权利要求23或24所述的方法,其中当晶片在度盘和处理室间移动时,机械手的手臂拿着晶片一面的固定位置。
26.根据权利要求25所述的方法,其中机械手的手臂低手将晶片送入处理室,并高手将晶片插入处理室。
27.根据权利要求25所述的方法,其中机械手的手臂有一个用于握住晶片的终端操纵装置,它还包括在将晶片插入处理室后清洁终端操纵装置的步骤,不需把机械手的手臂从处理室拿出,垂直对准终端操纵装置,然后把该终端操纵装置下移到处理室的终端操纵装置清洁器。
28.根据权利要求23所述的方法,还包括用冲洗和离心干燥处理晶片的步骤。
29.根据权利要求22所述的设备,其中货盘前移系统包括度盘中的横向移位系统和纵向移位系统。
30.根据权利要求29所述的设备,其中在度盘中的横向移位系统还包括在对角方向的一对提升元件,提升执行器与各提升元件结合,横向移位电机接到各提升元件。
31.根据权利要求30所述的设备,其中提升元件包括装在滑道上的叉指,以及包括气缸在内的提升执行器。
32.根据权利要求29所述的设备,其中提升元件接到移位电机,并通过横向运动传动带彼此相连。
33.一种在自动半导体处理系统中,操作运行中度盘的方法,包括如下步骤:
把第一个料盒上载到位于度盘第一位置的第一个货盘中;
通过提升和传送,把第一个货盘从度盘中的第一位置移到第二位置;然后降下第一货盘下面的提升元件;
通过把载前提升元件至少部分从第二个货盘下面移出,把第二个货盘从载前位置移到第一位置,以接受第二个料盒,然后把第二个提升元件移到第二个货盘下面,提升第二个货盘,把第二个货盘送到第一位置,然后再把第二个货盘降到到第一位置;接着
把第二个料盒加载到第二个货盘。
34.根据权利要求33所述的方法,其中第二个货盘的传送运动垂直于第一个货盘的传送运动。
35.根据权利要求33所述的方法,还包括在第一位置上检测是否至少存在一个货盘,料盒和料盒中晶片的步骤。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/112,259 US6273110B1 (en) | 1997-12-19 | 1998-07-08 | Automated semiconductor processing system |
| US09/112,259 | 1998-07-08 | ||
| US09/274,511 US6279724B1 (en) | 1997-12-19 | 1999-03-23 | Automated semiconductor processing system |
| US09/274,511 | 1999-03-23 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1308565A CN1308565A (zh) | 2001-08-15 |
| CN1126610C true CN1126610C (zh) | 2003-11-05 |
Family
ID=26809757
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN99808318A Expired - Fee Related CN1126610C (zh) | 1998-07-08 | 1999-06-25 | 半导体自动处理设备和方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US6279724B1 (zh) |
| EP (1) | EP1109632A4 (zh) |
| JP (1) | JP2002520140A (zh) |
| CN (1) | CN1126610C (zh) |
| TW (1) | TW507265B (zh) |
| WO (1) | WO2000002675A1 (zh) |
Families Citing this family (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6471460B1 (en) * | 1996-07-15 | 2002-10-29 | Semitool, Inc. | Apparatus for processing a microelectronic workpiece including a workpiece cassette inventory assembly |
| US6736148B2 (en) * | 1997-05-05 | 2004-05-18 | Semitool, Inc. | Automated semiconductor processing system |
| US20030051972A1 (en) * | 1997-05-05 | 2003-03-20 | Semitool, Inc. | Automated immersion processing system |
| US6439824B1 (en) | 2000-07-07 | 2002-08-27 | Semitool, Inc. | Automated semiconductor immersion processing system |
| US6572320B2 (en) * | 1997-05-05 | 2003-06-03 | Semitool, Inc. | Robot for handling workpieces in an automated processing system |
| US7067018B2 (en) | 1997-05-05 | 2006-06-27 | Semitool, Inc. | Automated system for handling and processing wafers within a carrier |
| US20030051974A1 (en) * | 1997-05-05 | 2003-03-20 | Semitool, Inc. | Automated semiconductor processing system |
| US6454514B2 (en) | 1998-07-08 | 2002-09-24 | Semitool, Inc. | Microelectronic workpiece support and apparatus using the support |
| JP3513437B2 (ja) | 1999-09-01 | 2004-03-31 | キヤノン株式会社 | 基板管理方法及び半導体露光装置 |
| US6502054B1 (en) | 1999-11-22 | 2002-12-31 | Lam Research Corporation | Method of and apparatus for dynamic alignment of substrates |
| US6629053B1 (en) * | 1999-11-22 | 2003-09-30 | Lam Research Corporation | Method and apparatus for determining substrate offset using optimization techniques |
| JP2001291698A (ja) * | 2000-04-10 | 2001-10-19 | Nec Corp | 処理装置および処理方法 |
| CH714282B1 (de) * | 2000-07-06 | 2019-04-30 | Murata Machinery Ltd | Lagersystem mit Förderelementen. |
| JP2004524673A (ja) * | 2000-07-07 | 2004-08-12 | セミトゥール・インコーポレイテッド | 自動処理システム |
| US20040025901A1 (en) * | 2001-07-16 | 2004-02-12 | Semitool, Inc. | Stationary wafer spin/spray processor |
| US6668844B2 (en) | 2001-07-16 | 2003-12-30 | Semitool, Inc. | Systems and methods for processing workpieces |
| WO2003008114A1 (en) * | 2001-07-16 | 2003-01-30 | Semitool, Inc. | Systems and methods for processing workpieces |
| EP1460676A3 (en) * | 2001-11-13 | 2005-10-26 | FSI International, Inc. | Reduced footprint tool for automated processing of microelectronic substrates |
| JP2005510055A (ja) | 2001-11-13 | 2005-04-14 | エフエスアイ インターナショナル インコーポレイテッド | マイクロエレクトロニクス基板の自動処理用の低減フットプリントツール |
| GB0204882D0 (en) * | 2002-03-01 | 2002-04-17 | Trikon Technologies Ltd | Pedestal |
| JP4033689B2 (ja) * | 2002-03-01 | 2008-01-16 | 東京エレクトロン株式会社 | 液処理装置および液処理方法 |
| US6893505B2 (en) | 2002-05-08 | 2005-05-17 | Semitool, Inc. | Apparatus and method for regulating fluid flows, such as flows of electrochemical processing fluids |
| US6830057B2 (en) * | 2002-11-01 | 2004-12-14 | Semitool, Inc. | Wafer container cleaning system |
| US7289734B2 (en) * | 2002-12-24 | 2007-10-30 | Tropic Networks Inc. | Method and system for multi-level power management in an optical network |
| JP4606195B2 (ja) | 2004-03-08 | 2011-01-05 | 富士フイルム株式会社 | 液晶化合物、液晶組成物、重合体、位相差板、及び楕円偏光板 |
| US7905960B2 (en) | 2004-03-24 | 2011-03-15 | Jusung Engineering Co., Ltd. | Apparatus for manufacturing substrate |
| US7783383B2 (en) * | 2004-12-22 | 2010-08-24 | Intelligent Hospital Systems Ltd. | Automated pharmacy admixture system (APAS) |
| WO2006069361A2 (en) * | 2004-12-22 | 2006-06-29 | Intelligent Hospital Systems Ltd. | Automated pharmacy admixture system (apas) |
| JP4613079B2 (ja) | 2005-03-04 | 2011-01-12 | 富士フイルム株式会社 | 液晶組成物、位相差板および楕円偏光板 |
| DE102005017945A1 (de) * | 2005-04-18 | 2006-10-19 | Paul Hartmann Ag | Erste-Hilfe-Material-Einheit, Verfahren sowie Verbandsmaterialbehältnis |
| US8821099B2 (en) | 2005-07-11 | 2014-09-02 | Brooks Automation, Inc. | Load port module |
| US7931859B2 (en) | 2005-12-22 | 2011-04-26 | Intelligent Hospital Systems Ltd. | Ultraviolet sanitization in pharmacy environments |
| ITBO20060559A1 (it) * | 2006-07-26 | 2008-01-27 | Tissue Logistics Solutions S P A | Macchina per la produzione di gruppi di prodotti in rotolo. |
| US9117859B2 (en) | 2006-08-31 | 2015-08-25 | Brooks Automation, Inc. | Compact processing apparatus |
| US7602562B2 (en) | 2007-05-21 | 2009-10-13 | Electro Scientific Industries, Inc. | Fluid counterbalance for a laser lens used to scribe an electronic component substrate |
| US8271138B2 (en) | 2007-09-12 | 2012-09-18 | Intelligent Hospital Systems Ltd. | Gripper device |
| US8225824B2 (en) | 2007-11-16 | 2012-07-24 | Intelligent Hospital Systems, Ltd. | Method and apparatus for automated fluid transfer operations |
| JP4515507B2 (ja) * | 2008-01-31 | 2010-08-04 | 東京エレクトロン株式会社 | プラズマ処理システム |
| DE102008027861A1 (de) * | 2008-06-11 | 2009-12-17 | Vistec Semiconductor Systems Jena Gmbh | Vorrichtung zum Halten von scheibenförmigen Objekten |
| EP2382514B1 (en) | 2008-12-23 | 2018-10-17 | Xoma (Us) Llc | Flexible manufacturing system |
| US8386070B2 (en) | 2009-03-18 | 2013-02-26 | Intelligent Hospital Systems, Ltd | Automated pharmacy admixture system |
| US8626329B2 (en) * | 2009-11-20 | 2014-01-07 | Agr Automation Ltd. | Product assembly system and control software |
| JP5614352B2 (ja) * | 2011-03-29 | 2014-10-29 | 東京エレクトロン株式会社 | ローディングユニット及び処理システム |
| CN104245885B (zh) | 2012-04-20 | 2016-09-07 | Lg化学株式会社 | 可聚合液晶化合物、可聚合液晶组合物以及光学各向异性体 |
| CN102921677B (zh) * | 2012-10-24 | 2015-06-03 | 深圳创维-Rgb电子有限公司 | 电源板刷板除污一体化自动机 |
| SG11201503659QA (en) | 2012-11-28 | 2015-06-29 | Acm Res Shanghai Inc | Method and apparatus for cleaning semiconductor wafer |
| AT515531B1 (de) * | 2014-09-19 | 2015-10-15 | Siconnex Customized Solutions Gmbh | Halterungssystem und Beschickungsverfahren für scheibenförmige Objekte |
| KR101734241B1 (ko) * | 2015-12-10 | 2017-05-11 | 현대자동차 주식회사 | 트렁크 리드 힌지 지능형 로더유닛 |
| TWI674930B (zh) * | 2017-04-18 | 2019-10-21 | 韓商Sti股份有限公司 | 用於清潔容器的設備 |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL176841C (nl) * | 1975-03-04 | 1985-06-17 | Philips Nv | Transport inrichting voor testmonsterdragers, alsmede deze dragers. |
| FR2314390A1 (fr) * | 1975-06-13 | 1977-01-07 | Sofermo | Articulation modulaire autonome pour mecanismes divers et en particulier pour robots |
| US4506777A (en) * | 1978-12-04 | 1985-03-26 | Beckman Instruments, Inc. | Sample handling apparatus |
| DE3171220D1 (en) | 1980-09-02 | 1985-08-08 | Heraeus Schott Quarzschmelze | Method of and apparatus for transferring semiconductor wafers between carrier members |
| DE3114032C2 (de) * | 1981-04-07 | 1983-04-14 | Gerd 8151 Osterwarngau Stückler | Teilezuführung für einen Bestückungstisch |
| JPS59114206A (ja) * | 1982-12-21 | 1984-07-02 | Toshiba Corp | パレツトコンベア装置 |
| US4568234A (en) | 1983-05-23 | 1986-02-04 | Asq Boats, Inc. | Wafer transfer apparatus |
| US4667081A (en) * | 1985-02-04 | 1987-05-19 | Spectra-Physics, Inc. | Apparatus for changing the direction of a light beam passing through an articulated joint |
| US4806057A (en) * | 1986-04-22 | 1989-02-21 | Motion Manufacturing, Inc. | Automatic wafer loading method and apparatus |
| JPS63219134A (ja) | 1987-03-09 | 1988-09-12 | Mitsubishi Electric Corp | 拡散炉ウエハ・ハンドラ装置 |
| US5030057A (en) * | 1987-11-06 | 1991-07-09 | Tel Sagami Limited | Semiconductor wafer transferring method and apparatus and boat for thermal treatment of a semiconductor wafer |
| US5431421A (en) | 1988-05-25 | 1995-07-11 | Semitool, Inc. | Semiconductor processor wafer holder |
| US5064337A (en) | 1988-07-19 | 1991-11-12 | Tokyo Electron Limited | Handling apparatus for transferring carriers and a method of transferring carriers |
| JPH02286510A (ja) * | 1989-04-28 | 1990-11-26 | Tsubakimoto Chain Co | 台車連結式コンベヤ |
| US5203445A (en) * | 1990-03-17 | 1993-04-20 | Tokyo Electron Sagami Limited | Carrier conveying apparatus |
| US5186594A (en) | 1990-04-19 | 1993-02-16 | Applied Materials, Inc. | Dual cassette load lock |
| JPH081922B2 (ja) * | 1991-01-25 | 1996-01-10 | 株式会社東芝 | ウェハ−保持装置 |
| US5232328A (en) | 1991-03-05 | 1993-08-03 | Semitool, Inc. | Robot loadable centrifugal semiconductor processor with extendible rotor |
| JPH081923B2 (ja) | 1991-06-24 | 1996-01-10 | ティーディーケイ株式会社 | クリーン搬送方法及び装置 |
| JPH05146984A (ja) | 1991-07-08 | 1993-06-15 | Murata Mach Ltd | ウエハカセツト用ハンドリングロボツト |
| US5215420A (en) | 1991-09-20 | 1993-06-01 | Intevac, Inc. | Substrate handling and processing system |
| NL9200446A (nl) | 1992-03-10 | 1993-10-01 | Tempress B V | Inrichting voor het behandelen van microschakeling-schijven (wafers). |
| US5378145A (en) | 1992-07-15 | 1995-01-03 | Tokyo Electron Kabushiki Kaisha | Treatment system and treatment apparatus |
| DE4404902C2 (de) * | 1994-02-16 | 2002-04-11 | Hauni Maschinenbau Ag | Verfahren und Einrichtung zur Handhabung von Zigarettenschragen aufnehmenden Containern |
| US5544421A (en) * | 1994-04-28 | 1996-08-13 | Semitool, Inc. | Semiconductor wafer processing system |
| US5664337A (en) | 1996-03-26 | 1997-09-09 | Semitool, Inc. | Automated semiconductor processing systems |
| US5784797A (en) | 1994-04-28 | 1998-07-28 | Semitool, Inc. | Carrierless centrifugal semiconductor processing system |
| ES2229247T3 (es) | 1995-03-28 | 2005-04-16 | Brooks Automation Gmbh | Estacion de carga y descarga para instalaciones de tratamiento de semiconductores. |
| US5613821A (en) | 1995-07-06 | 1997-03-25 | Brooks Automation, Inc. | Cluster tool batchloader of substrate carrier |
| US5674039A (en) | 1996-07-12 | 1997-10-07 | Fusion Systems Corporation | System for transferring articles between controlled environments |
| US5731678A (en) | 1996-07-15 | 1998-03-24 | Semitool, Inc. | Processing head for semiconductor processing machines |
| CH697146A5 (de) * | 1996-10-09 | 2008-05-15 | Tec Sem Ag | Greifvorrichtung zur Handhabung von Wafern. |
| US5885045A (en) * | 1997-03-17 | 1999-03-23 | Fortrend Engineering Corporation | Integrated wafer pod-load/unload and mass-transfer system |
-
1999
- 1999-03-23 US US09/274,511 patent/US6279724B1/en not_active Expired - Lifetime
- 1999-06-25 CN CN99808318A patent/CN1126610C/zh not_active Expired - Fee Related
- 1999-06-25 WO PCT/US1999/014414 patent/WO2000002675A1/en not_active Application Discontinuation
- 1999-06-25 EP EP99930722A patent/EP1109632A4/en not_active Withdrawn
- 1999-06-25 JP JP2000558925A patent/JP2002520140A/ja active Pending
- 1999-07-01 TW TW088111176A patent/TW507265B/zh not_active IP Right Cessation
-
2001
- 2001-08-17 US US09/932,719 patent/US20020044855A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002520140A (ja) | 2002-07-09 |
| TW507265B (en) | 2002-10-21 |
| CN1308565A (zh) | 2001-08-15 |
| EP1109632A4 (en) | 2006-11-22 |
| WO2000002675A9 (en) | 2000-07-06 |
| EP1109632A1 (en) | 2001-06-27 |
| WO2000002675A1 (en) | 2000-01-20 |
| US6279724B1 (en) | 2001-08-28 |
| US20020044855A1 (en) | 2002-04-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1126610C (zh) | 半导体自动处理设备和方法 | |
| JP7432457B2 (ja) | 基板処理システム | |
| CN1269707C (zh) | 模块分选器 | |
| US7311488B2 (en) | System and method for conveying flat panel display | |
| CN1118428C (zh) | 一体式的隔舱内部输送、存放及运送装置 | |
| CN1294658C (zh) | 用于smif和开启容器的通用工具接口和/或工件传送装置 | |
| CN102122609B (zh) | 自动排序的多向流水线处理设备 | |
| CN109417044B (zh) | 搬运系统 | |
| TWI430932B (zh) | The workpiece is moved into the system and the handling device | |
| CN1574271A (zh) | 基板运送装置和基板运送方法以及真空处理装置 | |
| CN111964591B (zh) | 电子产品零部件检测系统 | |
| US20170352556A1 (en) | Substrate-processing apparatus and method of manufacturing semiconductor device | |
| US20030159277A1 (en) | Method and apparatus for manually and automatically processing microelectronic workpieces | |
| CN213004545U (zh) | 扫光装置及扫光机 | |
| KR100962362B1 (ko) | 기판세정장치 | |
| CN1728356A (zh) | 基板处理装置 | |
| JP2020164282A (ja) | パネル搬送システム | |
| CN111747116A (zh) | 面板搬运装置及面板搬运系统 | |
| CN1689140A (zh) | 向处理工具提供衬底的方法和设备 | |
| CN1707272A (zh) | 检查装置 | |
| JP2515879Y2 (ja) | 基板支持具 | |
| JP2511728B2 (ja) | 基板給排装置 | |
| JP5872880B2 (ja) | 基板処理装置、基板移載装置及び半導体装置の製造方法 | |
| JP4237017B2 (ja) | 基板搬送装置 | |
| JPH06275700A (ja) | 基板処理システムおよびキャリア搬送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C19 | Lapse of patent right due to non-payment of the annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |